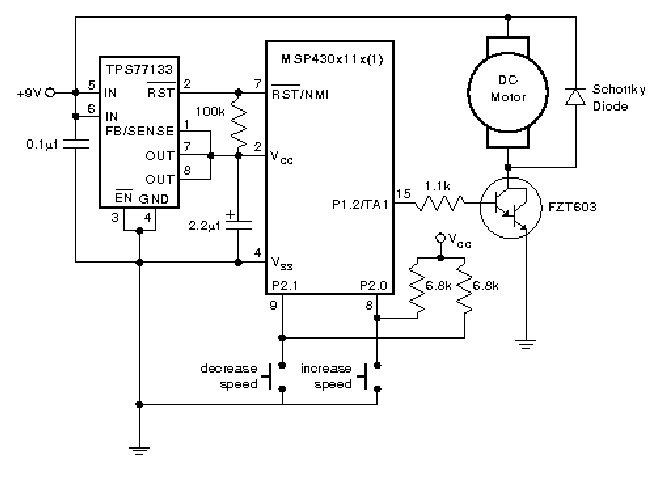
Bei der Ansteuerung von Gleichstrommotoren über PWM ist oft kein aktiver oder passiver Filter erforderlich, weil die rotierende träge Masse und die Induktivität des Rotors ein Tiefpassverhalten verursachen. Für den Betrieb eines DC-Motors ist eine Schaltung zur Trennung des Last- vom Steuerkreis erforderlich, da der MSP430 ja keine großen Lasten direkt treiben kann. Außerdem möchte man Motoren im Allgemeinen ja auch mit einer höheren Spannung als 3.3V betreiben. Die Application-Note SLAA120 von Texas Instruments [Tex00a] schlägt für den Betrieb eines DC-Motors mit Hilfe der Timer-A-PWM-Funktion die Schaltung aus Abbildung 7.14 vor.
Mit dem TPS77133 wird eine strombegrenzte Spannungsversorgung des MSP430 realisiert. Neben dem MSP430 als Steuereinheit ist der NPN-Darlington-Transistor FZT603 das wichtigste Bauteil, über den der Motor angesteuert wird. Der Transistor kann einen Dauergrenzstrom von 2A und einen Impulsstrom von bis zu 6A liefern. Der Stromverstärkungsfaktor B beträgt bei einem Laststrom von IC,Max = 2A etwa 10000. Damit wird der Ausgangspin des MSP mit maximal 0.2mA belastet:
Die Schottky-Diode parallel zum Motor dient als Freilaufdiode. Die Induktivität der Rotorwindungen führt nach dem Abschalten des Transistors (in den PWW Pausen) zu einer Selbstinduktion, um den Stromfluss aufrechtzuerhalten. Dabei kommt es zu hohen Spannungsspitzen, die den MSP und die restliche Schaltung beschädigen können. Durch die Durchlassspannung der Diode wird diese Spannungsspitze aber auf die Dioden-Durchlassspannung begrenzt. Man verwendet anstatt einer normalen Silizium-Diode gerne eine Schottky-Diode, da sich diese durch ein schnelles Schaltverhalten auszeichnen. Die Durchlassspannung von Schottky-Dioden liegt modellabhängig im Bereich von 0.6V bis 0.85V . In Kapitel 2.3.3 haben wir bei der Ansteuerung eines Relais schon einmal eine Freilaufdiode verwendet, da ein Relais ja ebenfalls eine Induktivität aufweist.