MedIT Paper auf dem Cover von Actuators
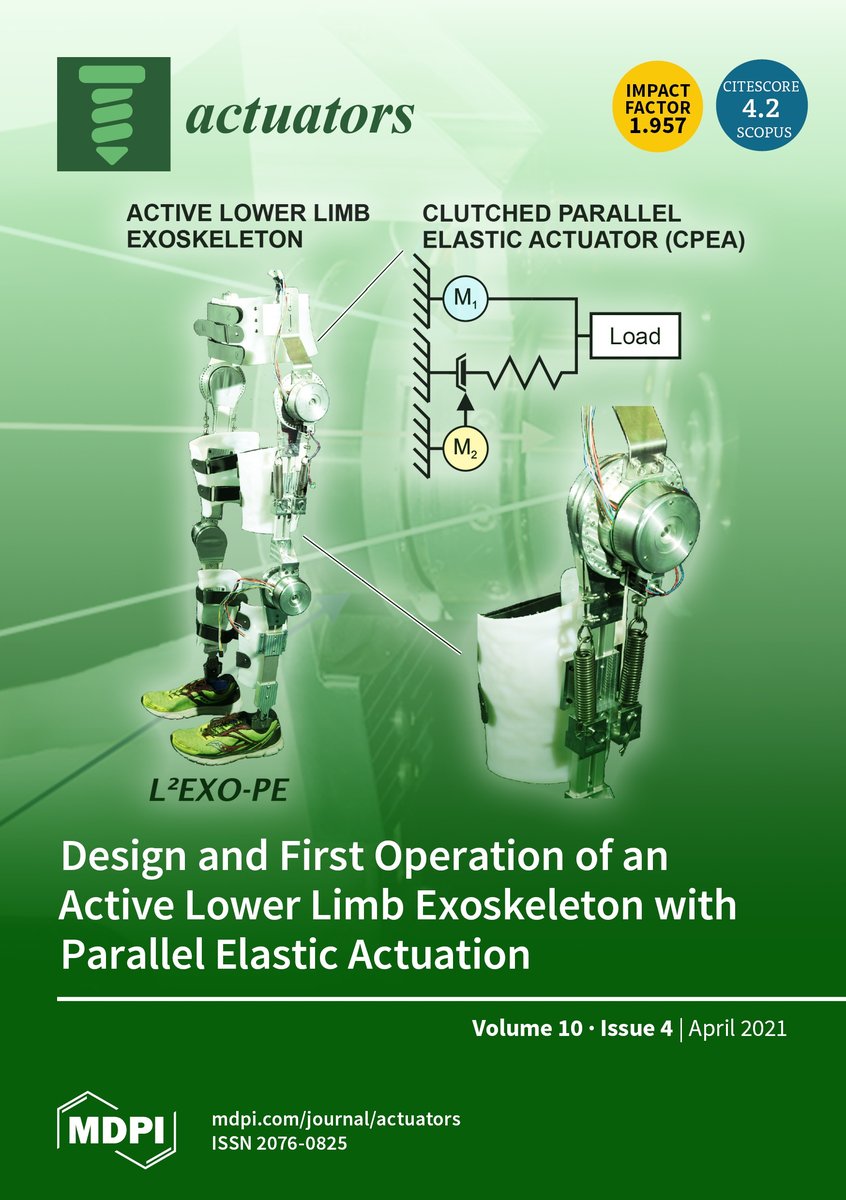
Der Beitrag „Design and First Operation of an Active Lower Limb Exoskeleton with Parallel Elastic Actuation“ ist auf dem Cover der Aprilausgabe von Actuators zu sehen!
Weitere Infos:
Actuators, Volume 10, Issue 4 (April 2021)
„Design and First Operation of an Active Lower Limb Exoskeleton with Parallel Elastic Actuation“
https://www.mdpi.com/2076-0825/10/4?utm_campaign=releaseissue_actuatorsutm_medium=emailutm_source=releaseissueutm_term=coverlink
"Parallel elastic actuators (PEA) are supposed to improve efficiency in periodic processes. In the presented study, a clutched parallel elastic actuator (CPEA) was integrated into the hip joint of an exoskeleton to provide more efficient support during gait. In gait experiments on the treadmill, the actuators were controlled using a cascaded control system with position reference. The CPEA achieved an up to 31% lower peak torque and up to 36% lower RMS power consumption than a direct actuator. Therefore, the actuator technology is promising for future applications in mobile rehabilitation robotics. "